Kurssi koostuu neljästä osiosta:
- Robottisolujen simulointi ja digitaaliset kaksoset:
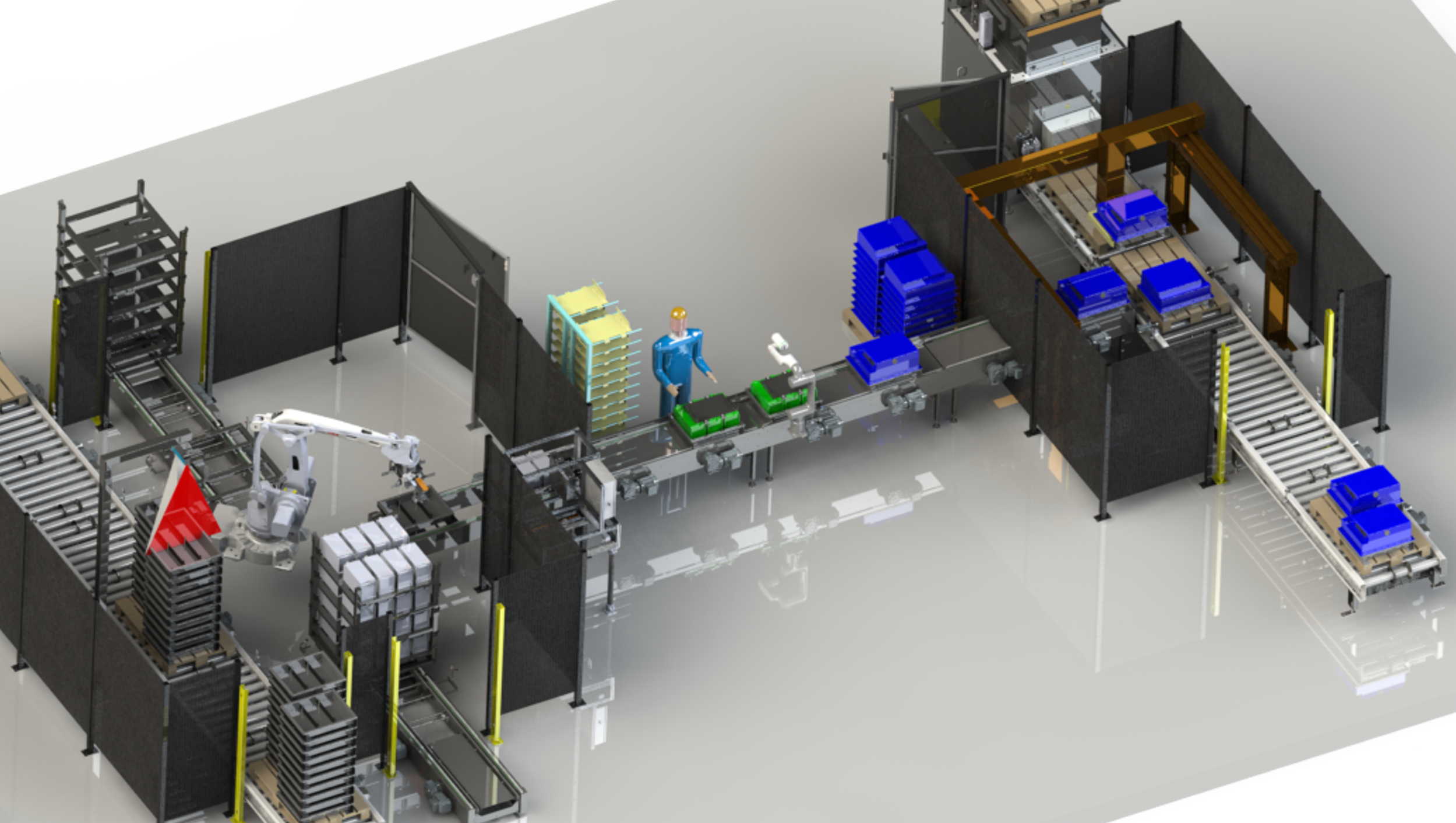
- Opit robottijärjestelmien simulointiin ja digitaalisiin kaksosiin liittyvän terminologian. Ymmärrät virtuaalisten teknologioiden hyödyt ja mahdollisuudet teollisten robottijärjestelmien suunnittelussa ja ohjelmoinnissa.
- Pääset tutustumaan robottijärjestelmien simulointiin käytettäviin ohjelmistoihin ja niiden toiminnallisuuksiin käytännössä ja itse kokeillen.
- Opit robottijärjestelmien simulointiin ja digitaalisiin kaksosiin liittyvän terminologian. Ymmärrät virtuaalisten teknologioiden hyödyt ja mahdollisuudet teollisten robottijärjestelmien suunnittelussa ja ohjelmoinnissa.
- Teollisuusrobottien ohjelmointi
- Opit teollisuusrobottien ohjelmoinnin perusteet, kuten ohjelmarakenteet, käskykannan, koordinaatistot, liiketyypit ja oheislaitteiden ohjauksen.
- Opit ohjelmoimaan ja testaamaan yksinkertaisen robottiohjelman etäohjelmointina ja opettamalla.
- Robotiikan turvallisuus
- Opit ymmärtämään teollisuusrobotiikan sekä ihmisen ja robotin yhteistyön turvallisuuden perusteet. Opit myös tuntemaan siihen liittyvän lainsäädännön.
- Pääset tutustumaan teollisuusrobotiikan turvallisuusratkaisuihin ja ihminen-robotti yhteistyön tulevaisuuden teknologioihin.
- (DFA) Kokoonpantavuuden suunnittelu
- Opit, mitä tarkoitetaan kokoonpantavuuden suunnittelulla (DFA, Design for Assembly) ja miksi se on tärkeä osa tuotesuunnittelua, varsinkin, mikäli tuote on tarkoitus kokoonpanna automaattisesti. Ymmärrät DFA:n perusperiaatteet ja miten niitä voidaan hyödyntää tuotteen suunnittelussa tai olemassa olevan tuotteen kehittämisessä. Lisäksi opit erilaisista työkaluista, joiden avulla voidaan tehdä DFA-analyysiä.
- Teacher
Jyrki Latokartano